

1, 跟踪球机安装介绍
2, 预置位设置
3, 预置位调用
4, 设置守望位
5, OSD的含义
6, 警戒区域介绍
7, 为守望位增加警戒区域
8, 设置巡航
9, 为巡航点设置警戒区域
在之前的文章中,我们就有为大家介绍过人体跟踪球机的使用方式,不过由于产品的更新迭代,之前的介绍难免有不足的地方,本次就为大家带来一份更为完善的介绍。
在本篇文章中,我将为大家介绍在使用人形跟踪球机过程中,一定要知道的几点:预置位的使用与调用,守望位跟踪与巡航跟踪的详细设置,以及警戒区域的详细设置方法。
大家了解了这些,基本上就可以完美流畅的使用人体跟踪球机,享受科技与监控结合所带来的乐趣。
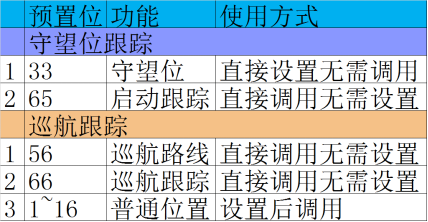
在看人形跟踪球机的设置方法之前,我们先看一下等下会用到哪些特殊预置位:
跟踪球机安装介绍
由于人形跟踪球机为AI精准检测人形人脸球机,对安装高度,角度和距离都有比较高的要求,具体要求如下:
1,相机视角为俯视角相机安装高度在3.5~6米,摄像机中心视线与水平角度0~30度之间
2,人形目标在画面中需要出现人的身躯和头部,且易区分出行人移动轨迹
3,摄像机应面向空旷场景尽量避免遮挡,人形目标的肩膀宽度在监测画面中需大于画面宽度的1/15以上且出现时间大于3秒

预置位设置
当我们有想要监控的区域,比如说一个大门,可以将这个位置作为预置位进行设置,后续一直想要快速监控这个区域的时候,直接进行预置位调用
1, 使用云台与变倍将画面调整至想要监控的最佳位置
2, 点击云台右下角的预置点符号进入预置位设置界面
3, 输入普通预置位点位,点击设置
此时即将监控画面作为一个预置位保存了下来,下次再想要监控这个区域的使用,直接调用设置的预置位点位即可

预置位调用
设置好预置位之后,我们就需要知道如何调用预置位
当画面被切换到其他场景,在设置预置位的界面输入设置好的预置位,点击调用即可直接将监控画面转到设置预置位时的画面
调用预置位后,监控会自动对焦变倍,使画面更清晰
在此强调一下:
1,只有设置并调用预置位后,球机才会启动跟踪,将画面直接拖动至某个区域,画面会检测人,显示红框,但是不会进行跟踪。设置了预置位以后,球机检测到人会显示黄框,并进行跟踪
2,警戒区域不能直接针对预置位进行设置,只能在守望位以及巡航点上设置,直接对预置位设置警戒区域,有可能导致已设置的预置位与警戒区域错乱,预置位与警戒区域位置偏移。如果出现预置位与警戒区域错乱的情况请使用83号清除指令,清除所有预置位

OSD的含义
细心的朋友可能会发现,在我们的左下角显示倍率的OSD右边还有两组数字,这两组数字代表的含义是摄像机水平和垂直的角度信息。
摄像机上OSD的含义如下:
左上角:自定义OSD,目前可通过我们的内网搜索设备直接更改
右上角:动态时间戳
左下角:3组
第一组:当前倍率
第二组:水平角度信息
第三组:垂直角度信息
其中左下角OSD的第二组水平角度信息的前缀字母又有以下三种派生定义:
S预置位跟踪 X巡航跟踪 P不跟踪
根据OSD显示的字母我们可以准确判断当前跟踪球机的跟踪状态
其他两组前缀字母无特殊定义
设置守望位
设置守望位需要用到两个特殊预置位
33号守望位预置位以及65号启动守望位跟踪预置位
在使用时
1, 我们按照正常设置预置位的方式设置好33号
2, 想要启动守望位跟踪时,我们是调用65号预置位,此时画面坐下角的第二组数字的前缀会变为
3, 想要修改守望位的监控区域,我们也是对33号的位置进行修改
强调:想要启动跟踪只有守望位跟踪与巡航跟踪两种模式

警戒区域介绍
警戒区域是一个强大的功能,设置警戒区域以后,监控可以做到区域内报警,区域外不报警。设置警戒区域可以提升球机应用范围,在路口,通道口设置警戒区域是一个非常不错的选择。下面就让我们一起来看一下如何进行警戒区域的设置:
1, 我们在监控画面的功能按钮栏划屏至最右侧,找到警戒区域的按钮
2, 点击进入电子围栏设置界面,此时我们还并不能直接设置警戒区域,需要先点击右上边的编辑按钮,进入编辑模式,此时编辑字样改为设置字样
3, 按顺序在屏幕上点击4个点,这4个点就组成了我们想要的警戒区域的位置
4, 如果对位置不满意我们可以拖动小圆点来改变区域的位置
5, 如果之前已经设置过了警戒区域,我们可以点击清除,将之前的警戒区域清除之后再进行新的设置
6, 点击右上边的设置按钮,电子围栏警戒区域即设置成功
7, 监控画面开始正常显示电子围栏,正常报警
注意:警戒区域只对守望位与巡航点生效,不能直接对预置位设置警戒区域,直接对预置位设置警戒区域,有可能导致已设置的预置位与警戒区域错乱,预置位与警戒区域位置偏移

为守望位增加警戒区域
警戒区域只对守望位与巡航点生效,不能直接对预置位设置警戒区域,直接对预置位设置警戒区域,有可能导致已设置的预置位与警戒区域错乱,预置位与警戒区域位置偏移。守望位包括2个预置位:33号设置守望位区域,65号启动守望位,我们为守望位设置警戒区域是要在启动守望位之后再设置警戒区域。下边我们先来看下如何为守望位设置警戒区域
1, 先使用33号预置位设置好守望位
2, 将画面拖动至其他区域,然后调用65启动守望位
3,在启动守望位后进入警戒区域,然后设置警戒区域,此时就对守望位设置了警戒区域
配图:4画面
设置33,调用65,进入警戒区域,设置警戒区域
设置巡航
监控的时候我们常常会遇到监控范围过大,无法同时兼顾画面内所有细节的情况,此时我们就需要设置巡航来帮助我们对区域内的画面进行细节上的监控。
在设置巡航之前,我们需要先对大的画面进行拆分,将他们拆分成一个个小的画面,然后将这些画面都设置成预置点,设置好之后我们调用启动巡航的预置位即可开始巡航监控画面内的所有细节
我现在设置了6个监控区域,并且将他们分别设置为了:
1号预置位,2号预置位,3号预置位,
4号预置位,5号预置位,6号预置位,
我们想要巡航应该怎么做呢?
1, 设置好想要监控的画面(6个预置位)
2, 调用56启动一号巡航路线(56号预置位可以指定1号巡航路线,他对应的是我们的1~16号普通预置位所组成的巡航,其他还有多条巡航路线,不过由于每次巡航默认只能启动一条,所以不推荐大家使用。通常情况下,56号预置位只需要调用一次,由于我们不切换巡航路线,在后续的使用过程中只需要调用66即可)
3, 调用66启动巡航跟踪,调用56号之后,球机并不会开始巡航,需要调用66才能正式开始巡航
4, 当我们想要为巡航路线增加区域,比如说我们现在设置了6个预置位(1~16号预置位),启动的是1号巡航路线(56号)我们直接将画面拖动至其他区域,将该区域设为7号预置位,7号预置位在1号巡航路线的预置位范围(1~16号预置位)内,设置7号预置位成功以后,球机下次再跑巡航的时候就会自动把7号预置位设置的区域也加上
5, 如果想要增加监控区域,但是不想让该点列入巡航路线内,我们可以设置16号预置位以上的预置位,比如:17号预置位。将区域设为17号预置位,17号预置位不在1号巡航路线的预置位范围(1~16号预置位)内,设置17号预置位成功以后,球机下次再跑巡航的时候就不会把17号预置位设置的区域加上
6,相邻的两个巡航点之间的间隔请不要超过180度
为巡航点设置警戒区域
巡航路线设置警戒区域是在启动巡航之后,巡航到达了一个巡航点,然后设置警戒区域,这个巡航点的警戒区域设置完成之后,等待几秒钟,球机会巡航自动跑到下一个巡航点,然后根据自己的需求将所有的巡航点都一一设置好警戒区域。
在为巡航路线设置警戒区域的时候,我们需要额外注意的是:巡航的时候跑的点虽然与设置预置位的画面相同,但是这些预置位在跑巡航以后,就会转换为巡航点,我们设置的警戒区域也是依托于巡航点而设置的,而非依托于预置位。
警戒区域只对守望位与巡航点生效,不能直接对预置位设置警戒区域,直接对预置位设置警戒区域,有可能导致已设置的预置位与警戒区域错乱,预置位与警戒区域位置偏移。
——————————————————————————————————————————————————————————————————————————————————
想了解更多专业智能监控高清网络摄像头和机芯,您可以访问我们的官网:http://www.szwean.com/ (深圳沃沃安科技有限公司)
我们是一家集研发、制造、营销于一体高清网络视频监视专业产品提供商,公司成立于2012年,拥有一支专业、专注的研发队伍,核心团队拥有超过10年以上的音视频开发经验。公司致力于研发和推广高性能、高质量的网络变倍一体机芯,高速球机以及集成各种智能算法的音视频产品。我们现在拥有多项完全自主研发的核心技术:自动聚焦算法,视频编解码,全网通协议,视频智能分析算法等。
我们支持接受各种形式的二次开发定制,提供设备端,云平台端SDK。我们致力于产品创新,集成各种智能算法,满足更多客户的需求,带来更好的产品体验,愿为客户创造更大的价值。