

多目标跟踪(MOT, Multiple Object Tracking)
多目标跟踪是CV规模一个热点标的目的,遍及应用于机械人导航、智能监控视频、工业检测、航空航天等规模。首要使命是找到图像序列中举动的物体,并将不合帧的举动物体逐一对应,末了给出不合物体的举动轨迹。
术语
1、检测:定位目标在图像中的位置。检测编制良多,例如帧间差分法、背景减除法、光流法等等;别的,检测常与识别连系。
2、跟踪:在连续图像序列中完成对目标的检测,并把物理意义下统一目标相联络关系。
3、轨迹(Trajectory):一条轨迹对付这一目标在一段时辰内的位置序列;是多目标跟踪体系的输出量。
4、数据联络关系:用于处理目标间的婚配问题;是多目标跟踪的焦点问题。
5、跟踪置信度:跟踪算法反响每一次跟踪的靠得住程度。
手艺流程详解
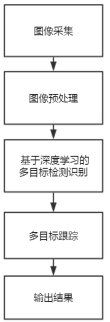
1、图像网罗
多目标跟踪对付图像网罗要求评估的身分与人脸识别不合不大。
2、图像预措置
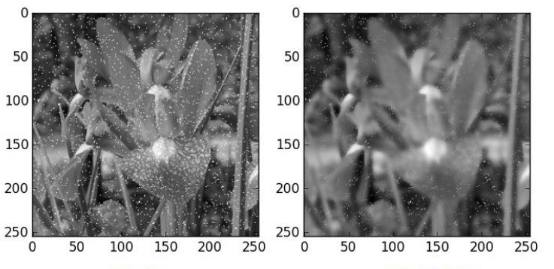
典范的图像预措置编制是直方图平衡和滤波。
1)直方图平衡
直方图描述了一副图像的灰度级内容,而直方图平衡化的首要目的,是为了进步比力度和灰度色彩的变化,使图像加倍清楚。

2)滤波
图像滤波的首要目的是,在保持图像特征的情形下停止噪声消弭,详细可以分为线性滤波和非线性滤波。非线性滤波比力线性滤波来说,更能呵护图像细节。
3、基于深度进修的多目标检测识别
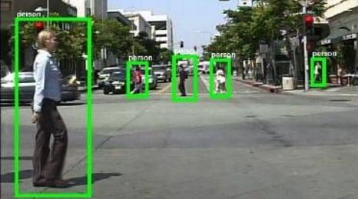
目标检测的本质是多目标的定位,即要在图片中定位多个目标物体。
例如下图,既要定位各个目标,还必要将不合目标用不合颜色的框表示。

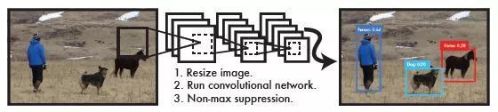
1)基于深度进修的目标检测算法:YOLO、YOLOv2、YOLO9000
YOLO(You Only Look Once)是基于深度进修编制的端到端实时目标检测体系。YOLO的进级版有两种:YOLOv2和YOLO9000。YOLO9000可以识别跨越9000类别。
YOLO对图片的措置轨范首要分为三个局部:
a.将图片缩放到448*448巨细
b.运转卷积搜集
c.设置模子置信度阈值,输出成效
2)基于深度进修的目标检测算法:SSD
SSD(Single Shot MultiBOX Detector),截止今朝是首要的检测框架之一,比力Fast-RNN速度更快;比力YOLO有较着的mAP上风(mAP:均匀精确率),但不及YOLO9000。
SSD错误错误:
a.调试过程很是依靠经历
b.检测小目标的召回率值不是很高
3)YOLO和SSD了局斗劲
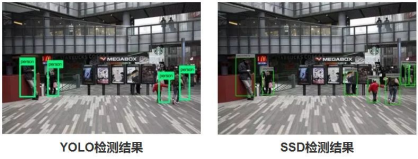
从图上可以看出,YOLO漏检率较高,SSD相对来说默示较好。
4)目标检测识别相干目标
a.切确率
b.召回率
c.识别精度:目标检测中权衡检测出精度的目标是均匀精确率均值mAP(mean average precision)
首先我们体味一下AP(均匀精确率)
均匀精确率:precision/recall曲线下方围成的曲面面积,如下图:
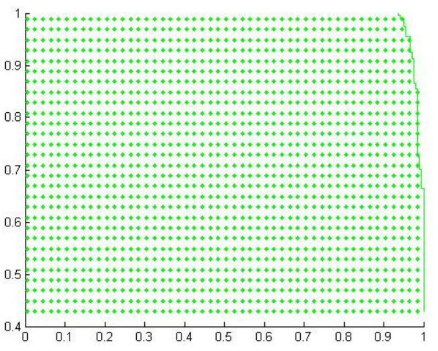
其中横坐标是recall,纵坐标是precision。AP是这个曲线下的面积,而mAP就是多个类别AP的均匀值,这个值介于0到1之间,且越大越好。
d.检测相应:检测过程的输出量。
e.识别服从:识别的速度。相对应选择服从极大化的迭代算法。
f.交并比(IoU):可以理解为体系预测出来的框与本来图中标识表记标帜框的重合程度,最抱负的情形是完全堆叠,即比值为1。
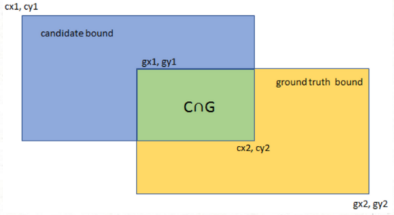
计较公式:

4、多目标跟踪
下图中的曲线是该目标的跟踪途径,图中线条即代表各个目标的轨迹。

今朝跟踪的难点:
a.遮挡、目标消失后再出现,会有丧失目标的征象;
b.类似目标随意被当成统一目标;
由于以上缘故缘由,在实际场景里多目标跟踪可能会产生人员频频检测、漏检、统一目标多条轨迹等情形。若是需求对人员统计很是严格,可以考虑由其他方案完成。多目标跟踪应用于一个区域(一个摄像头画面内),计较该区域内的目标数以及目标跟踪如许的场景会更好。
多目标跟踪的应用场景
目标识别常用来确定某画面或视频中包含什么物体、各个物体在什么位置、各个物体的轨迹。是以常用于监控,人机交互和假造实际的场景。
1)人员检测:计较画面中行人的数目,并确定其位置。
应用场景:
a.可用于计较区域人员密度过高告警。

产物功能考虑:在监控画面临区域停止划分,并对人员密度(梳理)停止设置。阈值的设置可以考虑和时辰连系,在某一段时辰内跨越某阈值即可告警。
把持本算法停止人员计较的错误错误是若是产生目标丧失,会将统一人的两个状态识别为两小我,使得真实数目与检测数目误差大。
b.可用于规模监测告警(越界监测):例如闯红灯、翻墙等事务。

产物功能考虑:在监控舆图里设置关注区域,当关注区域一旦出现人/车/其他物体,则可立即实现告警。特别合适对入侵举动必要重点提防的场合,比如展馆、缧绁、禁区等地。
c.非常举动检测:目标俄然产生强烈变化,如打斗打斗等举动。

产物功能考虑:对目标设定非常举动检测,当出现非常举动时即可告警。非常举动检测合适在对非常举动有必要重点提防的场合,比如黉舍、公共区域等地方。
2)车辆识别:计较画面中车辆的数目,并确定其位置。

应用场景:
a.可用于交通松懈,针对有可能产生拥堵的区域提早停止安排。
b.可用于追踪黑名单车辆:车辆检测可识别车辆类型、车辆颜色等等,这些信息均可用来定位目标。
c.防车辆套牌方案:车辆识别和车牌识别连系,防止车辆套牌案件产生
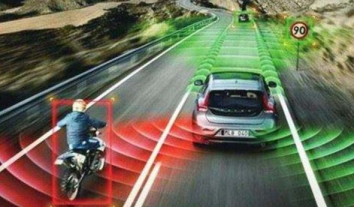
3)应用于智能驾驶方案:目标识别和场景朋分、SLAM连系,可识别出路径路况,供给智能驾驶所必要的路边物体信息。
4.多目标跟踪的应用场景
多目标跟踪监控类的产物如今已经有不少,拿商汤的软件产物作为典范例子:

1、产物功能分析
产物的功能首要有以下内容:摄像头个数、行人人次、非无邪车车次、无邪车车次、告警次数、监控画面、目标抓拍。
我们从大的划分来看,主若是四块:设备、统计、监控、抓拍。除了这四块之外,按照经历我们还必要考虑到历史的分析和检索。

1)设备
商汤的产物只浮现了设备的数目,而更重要的是设备的挑选功能。其实设备的节制很是复杂,我们经常为了监控摄像头的状态设计一个新的办理体系。在别的一个设备的办理体系中,我们必要跟踪设备的使用状态,设备的详细信息(对应的摄像头编号位置等),以及摄像头的定位。
2)统计
统计除了上例时辰段的统计之外,还可以停止某一时辰某一区域上的目标统计。某一时辰的统计的意义比时辰段统计在一些特定需求上更为重要。特别是某时辰目标数若是跨越阈值,跟告警体系婚配,可以捕捉群体举动。某时辰的目标数目是否跨越设定阈值,是多目标最常见的需求,也是典范应用之一。
3)监控
监控界面连系了多品种别的识别:例如行人的性别、头发是非、衣物类型等等。这也是多目标最“酷炫”的一局部,人们经常被体系的主动识别吸引。多目标在前端的表示经常是一个Boxing加一条尾巴,即目标的定位和轨迹。而目标旁的标签(属性),则是多目标识别和其他垂直标的目的识别的连系。
产物在这块有两局部工作:
a.跟进多目标的漏检率以及IoU,以及思虑统一管道多种属性识别的连系,以应对不合场景需求。更倾向手艺类。
b.关注监控体系的流利性和不变性。更倾向业务类。
4)抓拍
抓拍也是浮现多目标价值的典范功能之一。抓拍能将监控中的目标零丁地隔离出来,这是后续检索目标功能实现的前提。抓拍到的图片在界面展现时可把持缓存,之后建议存储至云端。
5)历史
a.搜索:跟通俗搜索体系比力,多目标体系必不成少的一个功能必定是图片检索。在体系中把持文字(与多目标的标签联络关系)或图片停止图片检索,能更随意查找到目标。
b.分析:把持大数据手艺,对历史的人流、车流、告警记实停止分析,有助于目标管控和后期阈值设置。
2、产物体系分析
1)实时性
监控体系最重要的一点是实时性,比力于通俗监控产物,AI监控体系对设备硬件的要求更高。图像措置速度和网速必要被综合评估,监控体系的延时征象必要节制在用户可接收规模内。
2)耦合性
AI监控体系链路长、设计到的子体系浩繁,是以在产物架构设计上必要考虑到轨范之间的耦合性。耦合程度太高会使体系的进级更新与维护加倍坚苦。
3)不变性
这里的不变性不仅网罗外界情形的影响,还有体系本身算法更新、轨范更新对体系的影响。特别是算法更新,不仅必要在目标上有所进步,还必要具有必定兼容性。算法更新经常导致轨范短时辰内无法使用,所以每一次算法替代都必要谨严考虑。
————————————————————————————————————————————————————————————————————————
想了解更多专业智能监控高清网络摄像头和机芯,您可以访问我们的官网:http://www.szwean.com/ (深圳沃沃安科技有限公司)
我们是一家集研发、制造、营销于一体高清网络视频监视专业产品提供商,公司成立于2012年,拥有一支专业、专注的研发队伍,核心团队拥有超过10年以上的音视频开发经验。公司致力于研发和推广高性能、高质量的网络变倍一体机芯,高速球机以及集成各种智能算法的音视频产品。我们现在拥有多项完全自主研发的核心技术:自动聚焦算法,视频编解码,全网通协议,视频智能分析算法等。
我们支持接受各种形式的二次开发定制,提供设备端,云平台端SDK。我们致力于产品创新,集成各种智能算法,满足更多客户的需求,带来更好的产品体验,愿为客户创造更大的价值。